Last summer, we organized a Kids Day at the office. Idea was to expose children to the world of technology and science their parents are working at, in a fun and engaging way. We wanted to show them how complex concepts can be simplified and made accessible to everyone, especially kids. Autonomous vehicle simulation is a great example of a complex topic that can be popularized in a fun way. To do so, we crafted a game that mirrors and slightly simplifies how an autonomous vehicle behaves. The kids learned about sensors, decision-making, and communication.
Context
To introduce the concept of autonomous vehicles, we started with a bunch of questions and let the kids answer them, with their own words and metaphors. Some of the answers were quite funny, but they all made sense in the end. Here are some of the questions we asked. We spent time discussing the answers, especially when answers were blurry or not clear enough, providing them with tangible examples and analogies to help them materialize the concepts better.
What is an autonomous vehicle?
A car that drives itself without the need for a driver. This one sounds easy but as they do not experience driving yet, it can be hard to grasp.
How does an autonomous vehicle work?
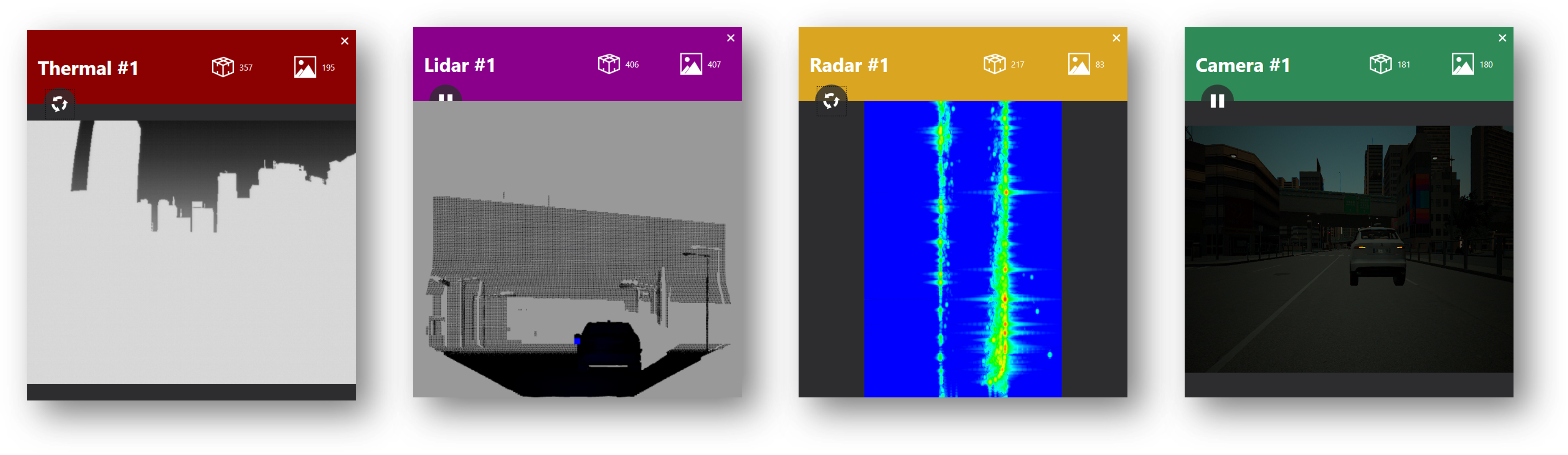
The driver is replaced by (many) sensors. We discussed how sensors like cameras, lidars, and radars work together to create a picture of the environment around the vehicle. We shared sensor outputs for them to better gauge how they work, and understand how they all contribute to enrich the perception of the world.

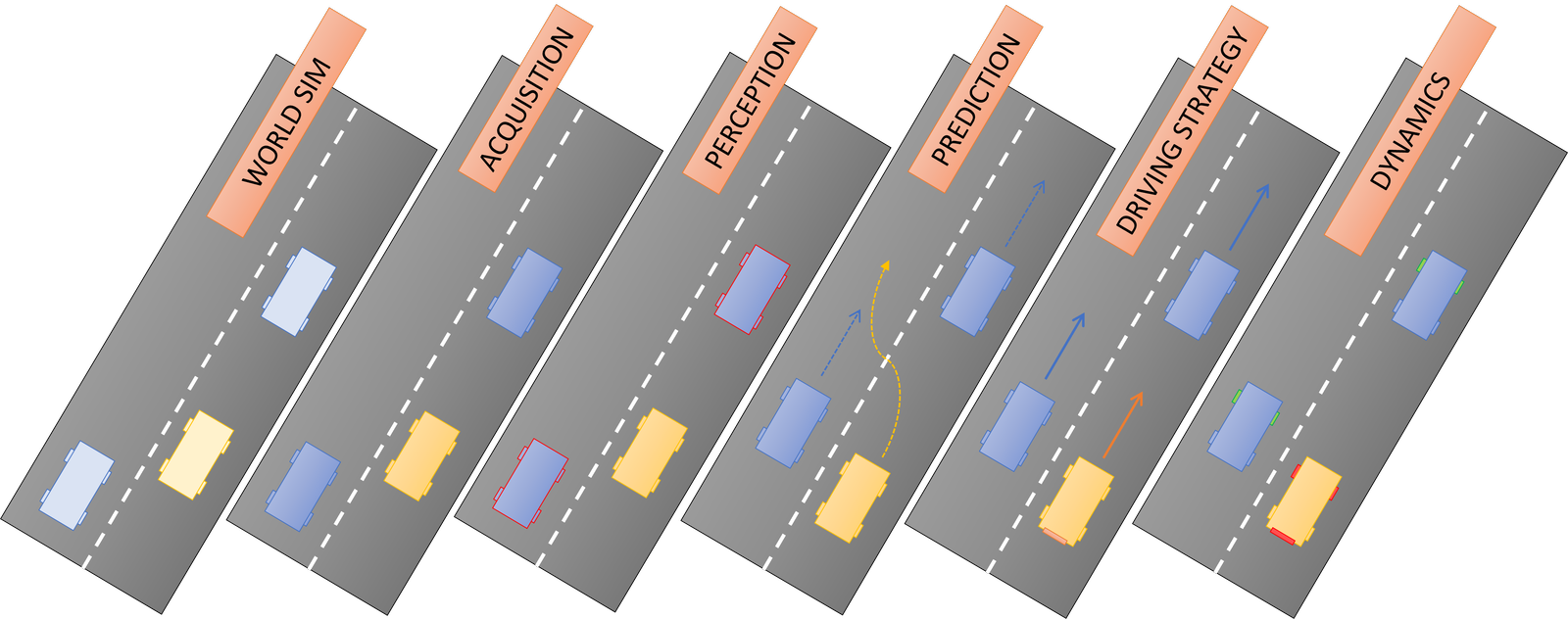
We also talked about the embedded softwares, which process the raw data from the sensors and ultimately make decisions based on it. We explained how the computer uses algorithms to analyze the data, make decisions about how to navigate the environment, and control the vehicle’s movements. Explaining a staged journey benefits from a visual aid, so we used a simple diagram to illustrate the process.
Which subjects you learned at school are useful for simulating an autonomous car?
Mathematics, Physics, Computer Science. Those ones were easy to answer, but they missed the important twist, Music! Autonomous vehicles are like a symphony, where each sensor and algorithm plays its part to create a harmonious whole. Symphony harmony can then be translated as crash free driving, which is the ultimate goal of autonomous vehicles.
What is the purpose of simulation?
We pursued with the music metaphor. A simulation is like a rehearsal for an orchestra. It allows the musicians to practice together, refine their performance, and ensure that everything works smoothly before the actual concert. In the same way, a simulation allows us to test and refine the behavior of an autonomous vehicle in a controlled environment before it hits the road. Simulation can also pause, rewind, or fast-forward, just like Netflix or Spotify, tracking history and performance over time.
But how does it work in real life..?
Let’s play a game!
Game Rules
Three children per vehicle, in single file line, each with a specific role:
- One acting as a sensor, wearing a paper bag with holes for their eyes and stand at the front
- One acting as the onboard computer, blindfolded, making decisions based on their teammate in front
- One acting as the sequencer, drawing cards from the deck and giving instructions to the other two.
We printed a deck of cards with different instructions, each representing a sensor or a decision-making action:
- Camera: I open my eyes and look straight ahead without turning my head.
- Lidar: I spin around while blinking.
- Decision: I decide to move forward, stop, or turn.
- Help: I ask another vehicle or the facilitator for help.
- Bug: Some issue occurred, I pass the turn without acting.
The cards were shuffled according to the scenario we were experimenting with and placed face down in a pile. At each turn, the sequencer draws the top card and announces it to the team. The sensor and the computer then act according to the card drawn. The sequencer does not discuss either the perception or the decision-making.
The game is played in a large open space, with some homemade chalk road markings and obstacles placed around to simulate a real-world environment. The goal is to navigate through the obstacles without crashing, using the sensors and decision-making abilities of the team.
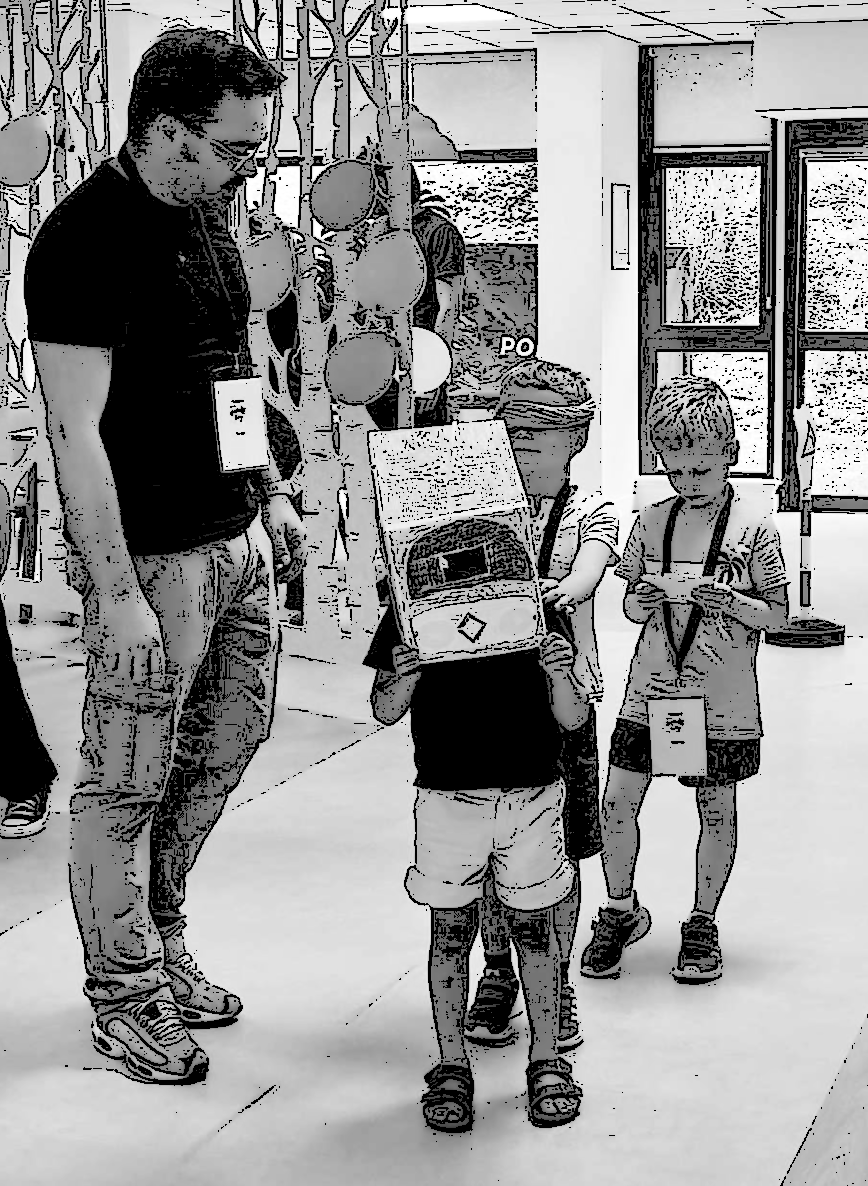
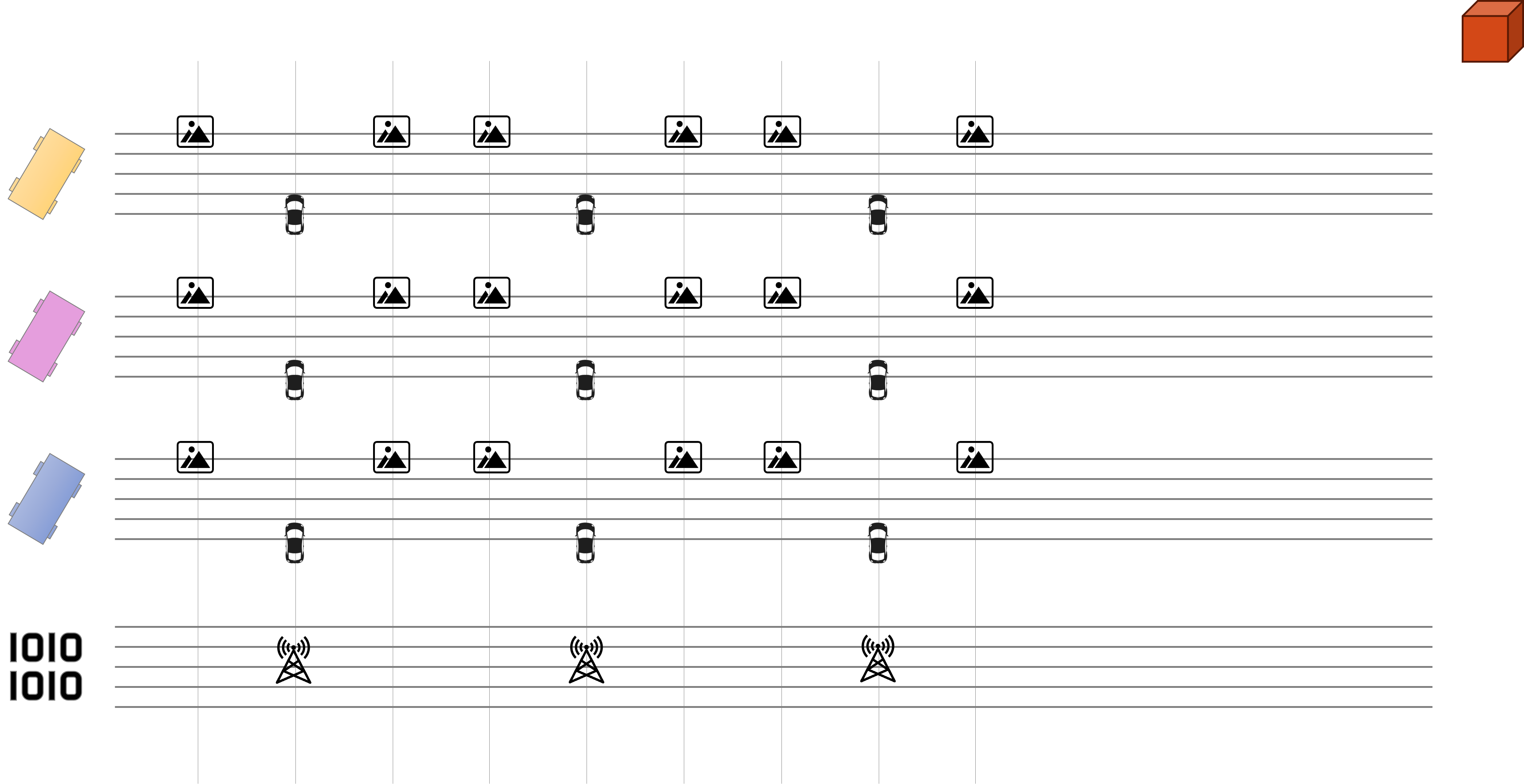
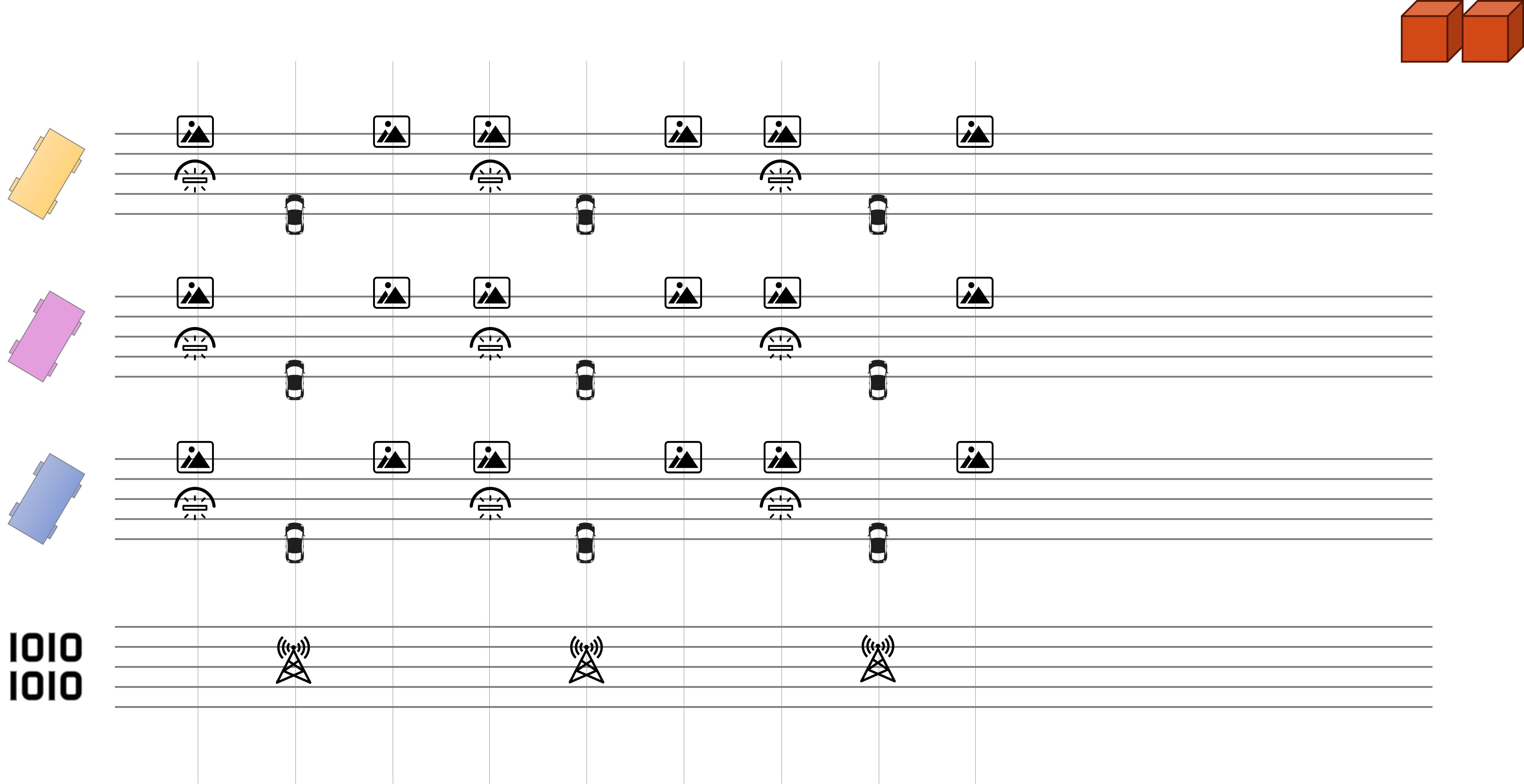
The game is played in rounds, with each round representing a different scenario. The scenarios can be as simple or as complex as desired, depending on the age and understanding of the children. For example, the first round assumes every vehicle is equipped with a single sensor, and the sensor type is the same for all vehicles. The second round introduces a second sensor. The third round varies the vehicles’ sensors, as in real life, where each vehicle has a different set of sensors. The game master can easily adapt the scenarios to the children’s understanding and experience, making it more or less challenging.
Each team starts at a different location to simulate traffic and force others to react accordingly. If a team struggles to either perceive or decide, it may impact other teams, as it occurs in real life. The game master can also introduce unexpected events, such as a sudden obstacle appearing or a sensor malfunctioning, to simulate real-world challenges.
Debriefing
Here are some questions you may ask the children after the game to help them reflect on their experience.
- Do you remember the questions we asked at the beginning?
- Are your answers still the same now that you have experienced the game?
- Was it easy to play the game?
- How did you feel when you were the sensor, the computer, or the sequencer?
- Did you notice that sensors do not see the world the way we are used to?
- Did you undersatnd why we need multiple sensors to perceive the world accurately?
- How did you communicate with your teammates?
- Was it easy or difficult to synchronize and trust each other?
- How comfortable were you making decisions blindly and quickly?
Variations
To mirror sensor acquisition accuracy from the simulation world, where sensors are approximated with geometric, stochastic, and physical models, we can introduce game variations:
- A camera can only say where the vehicle is in the field—left or right.
- A camera can also give a sense of distance, near or far.
- A camera can indicate the speed at which an obstacle is approaching.
It is a good way for kids to grasp the trade-off between sensor accuracy and cost, as well as the importance of sensor fusion in autonomous vehicles. The more sensors you have, the more accurate your perception of the environment is, but it also increases the complexity and cost of both the acquisition and the fusion stages.
Closing
We had a lot of fun with the children, and we learned a lot about how to explain complex concepts in a simple way. Everyone knows the explain this concept to a kid meme, but it’s not that easy to do in practice. Moreover, the children were impressed by the fact that their parents were working on something so cool and complex, and they were able to understand it in a fun way. It was a great experience for everyone involved, and we hope to organize more events like this in the future.